Efficient drive-file-determination by inverse modelling

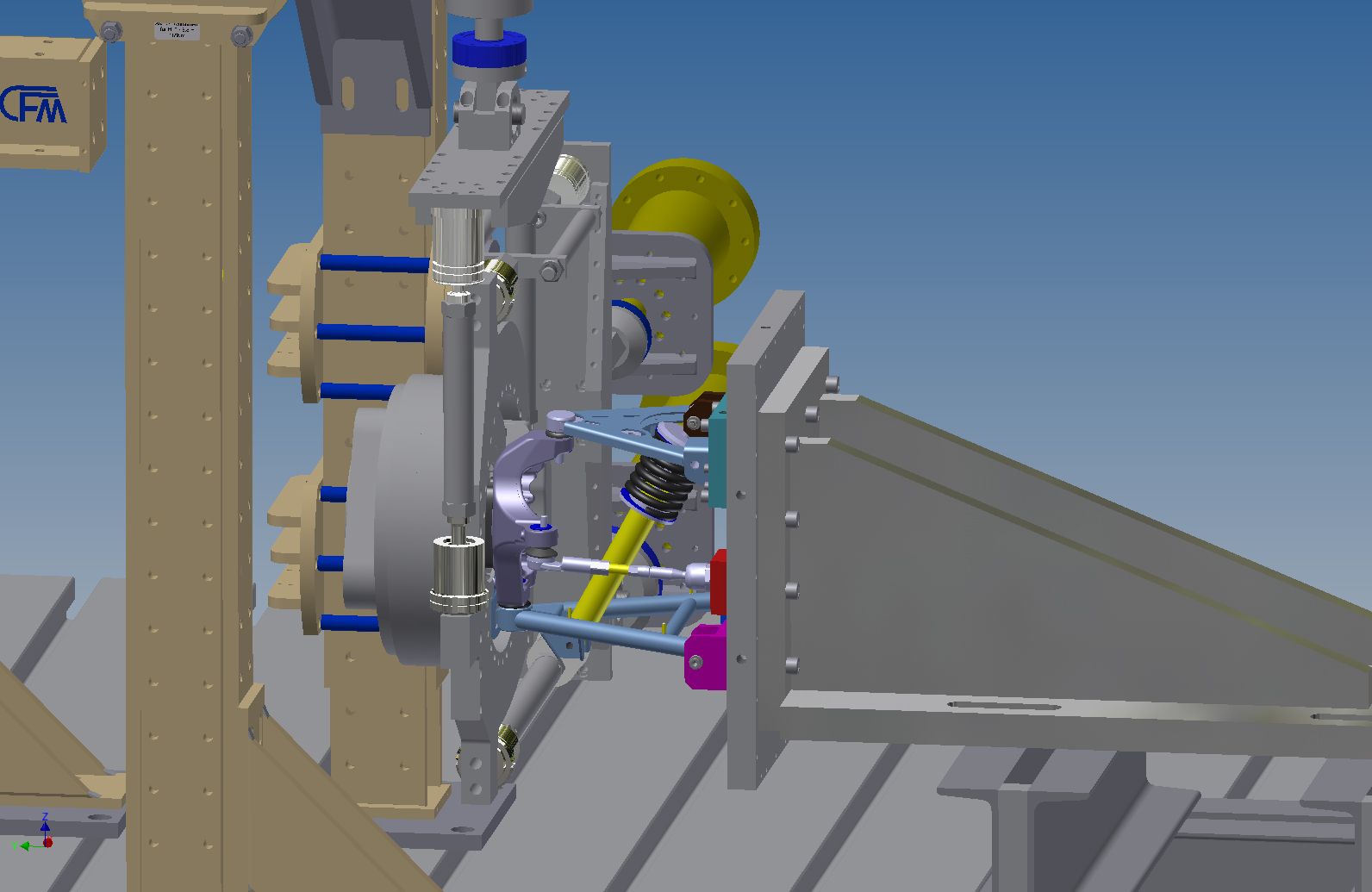
Figure 1: Three channeled servohydraulic test rig for fatigue testing of wheel guiding components.
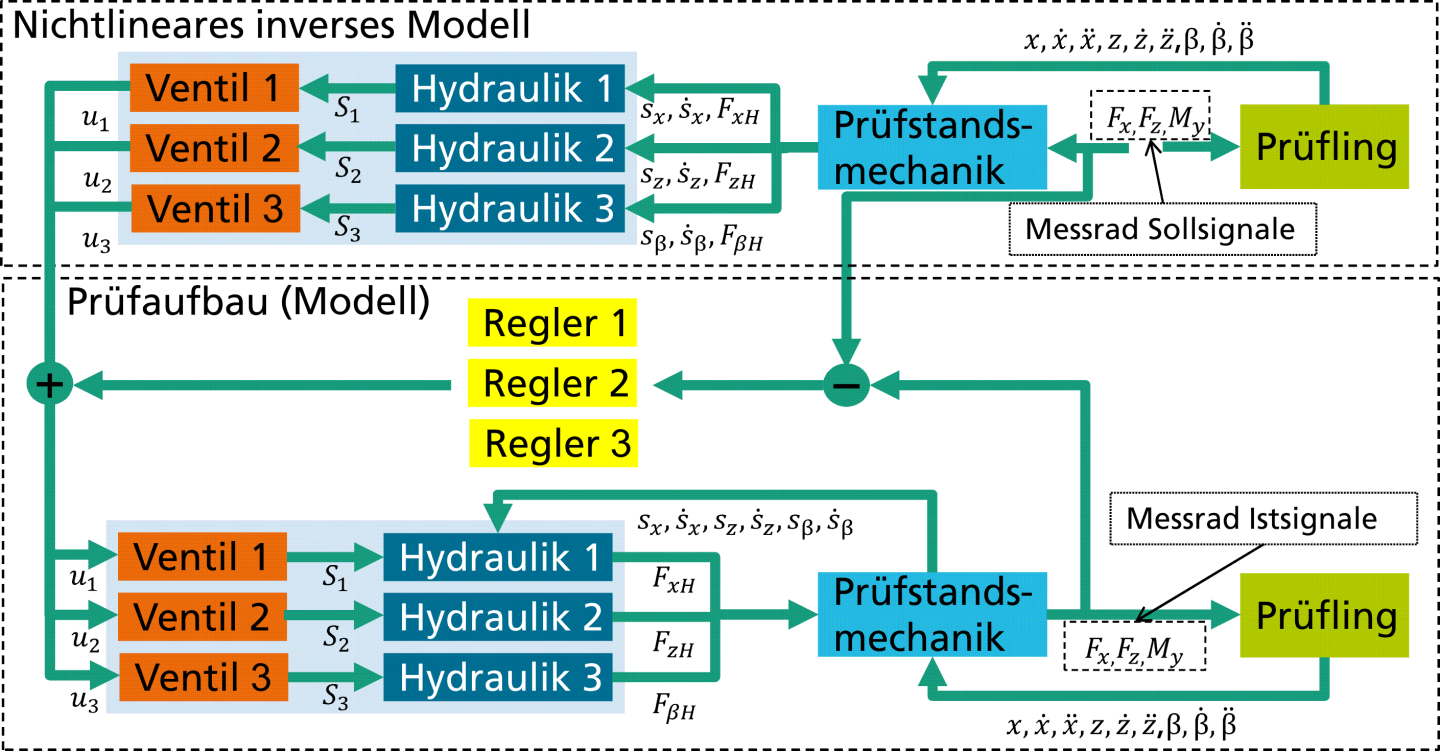
Figure 2: Structure of the model of the test system with upstream inverse model.
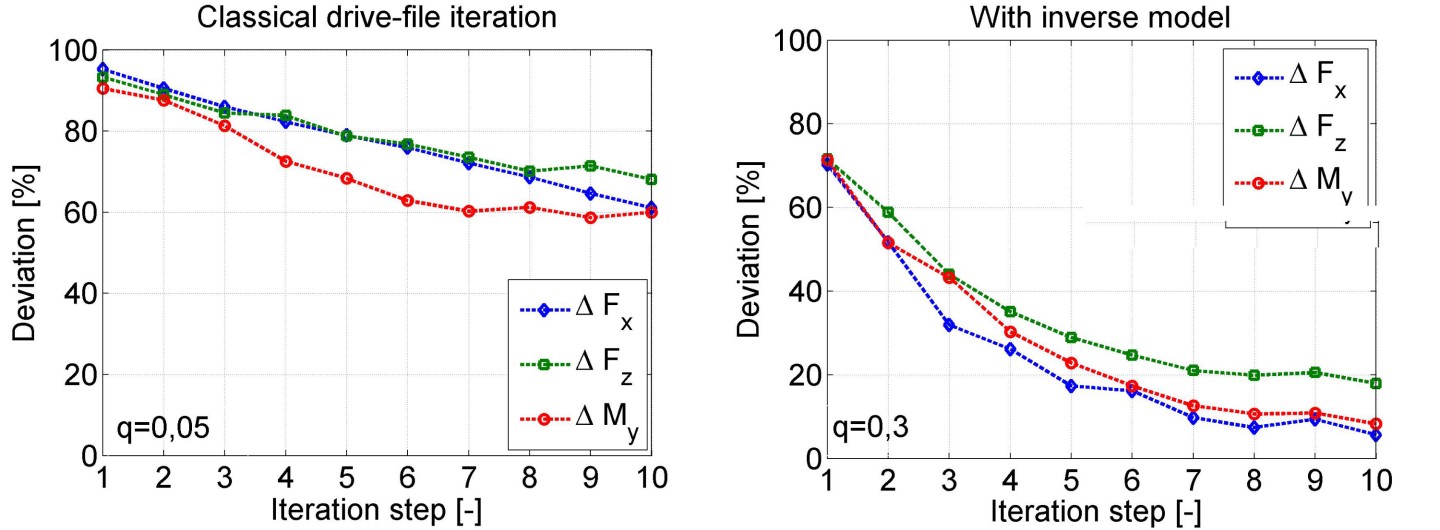
Figure 3: Convergence of the drive-file Iteration without (left hand side) and with (right hand side) use of the non-linear inverse model.
Problem:
For servohydraulic test rigs, which are commonly used for fatigue testing of chassis assemblies, there is a significant effort necessary for deriving the drive-files before starting the test. The drive files are needed in order to reproduce the service loads at the specimen on the test rig. This effort is mainly due to non-linearities in the dynamic system formed by the test rig and the specimen. The non-linearities of the test system arise for example from the hydraulics, the geometry, mechanical friction, rubber components and a semi-active damper.
Solution:
Instead of commonly used representation of the system dynamics by a linear transfer matrix a physical, non-linear model of test rig and specimen is created and inverted. This invers model computes the required drive-files directly using the required specimen loads as input, figure 2.
Results:
The individual channels are de-coupled and linearized to a large extend by the inverse model. Thus, the iteration converts much faster as shown in figure 3 saving time and effort during test preparation. Simulations do also show the robustness of the process in presence of model inacurracies. (Semi-)active systems can be easily included into this model-based approach.