Development of test procedures, systematics and methods

The development of test procedures and systematics as well as the provision of methods to provide proof of safety for automated vehicles were the topics of the BMWK lead project “VVMethods”. The partners worked on the use case of an urban intersection with a focus on driving functions up to the complete automation of vehicles (SAE Level 4 and 5).

The LBF played a leading role in the development of a systematic procedure for deriving functional test specifications for autonomous vehicles. Figure 1 shows the process steps of functional test planning for autonomous vehicles with their input and output variables.
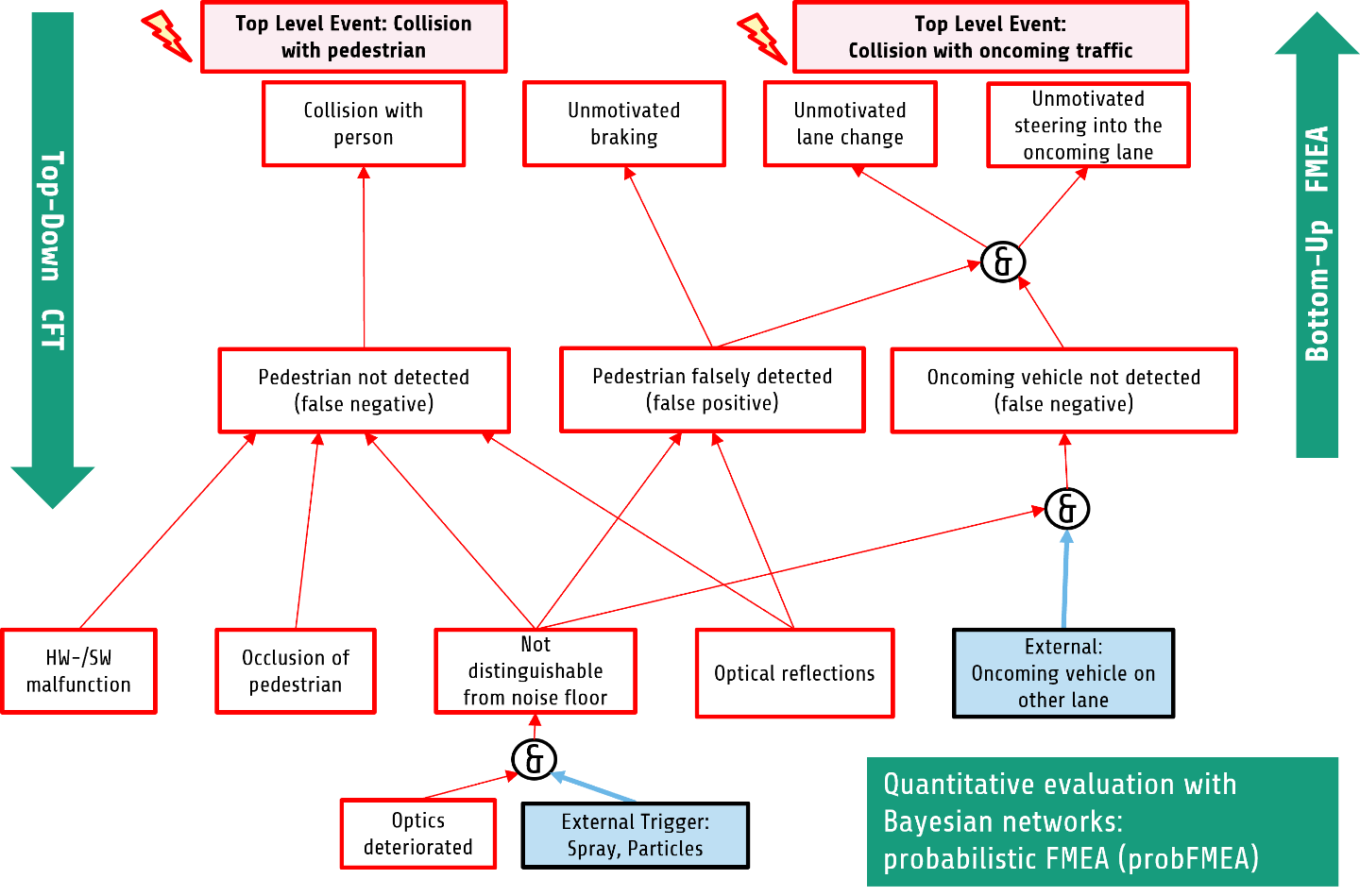
By combining the probabilistic failure mode and effects analysis (probFMEA) developed at LBF with IESE's component fault tree method and its implementation in the "safeTbox" software tool, an analysis method for evaluating functional safety was developed that can handle the volume of data and the complexity of the systems. Figure 2 shows how a new, efficient method for assessing the safety of autonomous vehicles was developed by combining probFMEA with component fault trees (CFT). By combining a bottom-up analysis (probFMEA) with the top-down approach of component fault trees, a better system coverage is achieved, among other things.
Together with the FZI Research Center for Information Technology, the LBF realized a test bench to investigate the robustness of a camera-based object recognition system under vibration load. The multi-axis vibrations are calculated using a dynamic vehicle model, considering the tire-road interaction. A multi-axis vibration exciter and active vibration control enable the simulation of vertical and rotational movements of the camera mounting position up to approx. 200 Hz (see Figure 3). It is determined how the imposed accelerations, which were previously recorded, affect a test camera to evaluate the accuracy of object recognition.


Design & Test Planning, Presentation at the final event of the project, Jürgen Nuffer (german)