Identifikation dynamik- und sicherheitsrelevanter Zustände mittels digitaler Zwillinge
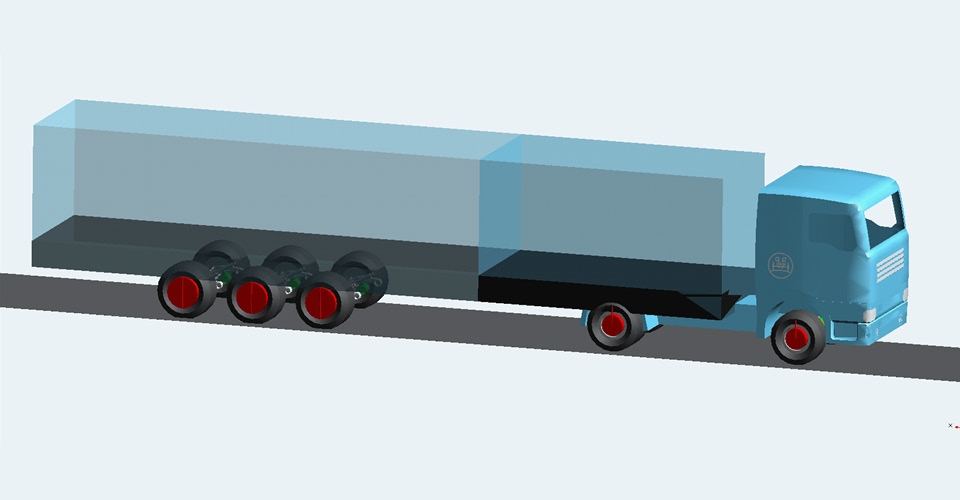
Mehrkörpersimulationsmodell des gesamten Fahrzeugs (Zugmaschine und Trailer) in MSC.Adams.
Der Kern der Lösung ist ein EDGE Device auf dem Trailer, der mithilfe eines Sensornetzwerks verschiedene Messgrößen wie Beschleunigungen, Drücke, oder Kamerabilder erfasst. Auf dem Rechner läuft ein digitaler Online-Zwilling, der die Daten in Echtzeit in einem Fahrdynamikmodell des Trailers verarbeitet. Besondere Fahrsituationen, die einer umfassenderen Analyse bedürfen, werden erkannt und automatisch an einen Cloud-basierten Offline-Zwilling zur detaillierteren Auswertung übergeben.
Der digitale Offline-Zwilling dient zur numerischen Simulation betriebsfestigkeitsrelevanter Fahrsequenzen, die vom Online-Zwilling während der Fahrt auf Basis spezifischer Messsignale identifiziert werden. Gemessene und vom Online-Zwilling identifizierte Zeitreihen und Parameter werden auf ein Cloud-System gesendet, auf dem der gesamte Prozess des Offline-Zwillings getriggert wird. Dieser besteht aus verschiedenen Funktionen, die von den Projektpartnern entwickelt und zusammen in eine Prozesskette integriert wurden. Zentrales Element ist ein detailliertes MKS-Modell des LKW-Trailers, das für die Simulation jedes Abschnittes automatisiert an den aktuellen identifizierten Zustand des realen Fahrzeugs mit entsprechenden Funktionen angepasst wird. Im Anschluss jeder Simulation berechnen zusätzliche Funktionen die Prognose des Betriebsfestigkeitszustandes ausgewählter Komponenten.

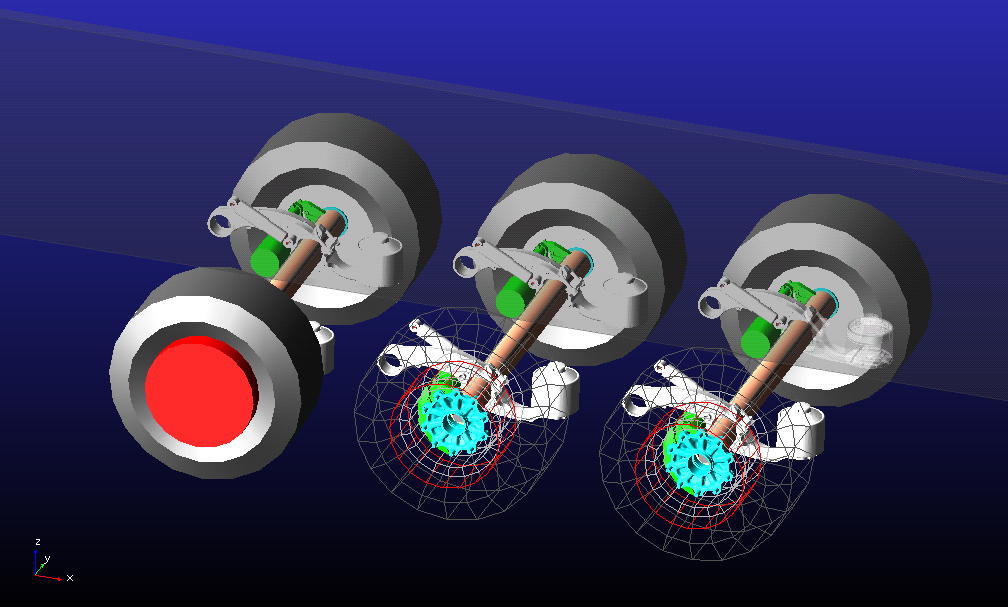
Zusätzlich zur Entwicklung und Implementierung des MKS-Modells und einiger Funktionen des Offline-Zwillings hat sich das LBF mit der Identifikation des Zustands der Fahrwerk-Elastomerlager beschäftigt. Hierfür wurden zwei parallele Ansätze verfolgt. Auf einer Seite wurden Physik-basierte Identifikationsalgorithmen entwickelt, die ein vereinfachtes mechanisches Modell der Achse mit Algorithmen zur Parameter-Identifikation kombinieren. Das ermöglicht die Schätzung der mechanischen Eigenschaften der Elastomerlager, die im Zusammenhang mit dem Zustand der Elastomerlager stehen. Auf der anderen Seite wurden KI-basierte Identifikationsalgorithmen implementiert, die einen direkten Zusammenhang zwischen verfügbaren Messdaten und dem Elastomerlager-Zustand bilden. Beide Ansätze konnten erfolgreich im Projekt umgesetzt werden. (weitere Infos zum KI-basiertes Elastomerlager-Monitoring)

Eine wesentliche Größe für den Modellierung des digitalen Zwillings sind die Kopplungskräfte am KingPin, über den der Trailer an die Zugmaschine angehängt wird. Eine Sensorinstrumentierung in Serie wäre aus Sicht der Modellqualität wünschenswert, scheidet aber aufgrund des hohen technischen Aufwandes aus. Im Ident Projekt wurde daher einmalig eine hochgenaue Messplattform aufgebaut, die alle Kräfte und Momente am KingPin erfasst. Die Modelle wurden mit diesen Messdaten abgeglichen, so dass diese Schnittkräfte zukünftig durch Modelle zuverlässig bestimmt werden können.

Ein Teil des Sensornetzwerkes ist auch ein Sensormodul das als Achskapsel eines Trailer Rades installiert wird. Ein kleiner Generator, der durch die Raddrehung gespeist wird, liefert genug Energie für die Versorgung von Sensoren, einem leistungsstarken Controller und verschiedenen Funkschnittstellen wir Bluetooth oder LoRaWAN. Der Achskapselsensor kann entweder als Teil des IDENT-Sensornetzes Daten für die digitalen Zwillinge sammeln oder als Stand-Alone Einheit Sensordaten erfassen, auswerten und per Funk verschicken.
Gefördert durch das Bundesministerium für Wirtschaft und Klimaschutz.
Dr.-Ing. Jan-Philipp Kobler, BPW Bergische Achsen