Effiziente Drive-Signal-Generierung durch inverse Modellierung
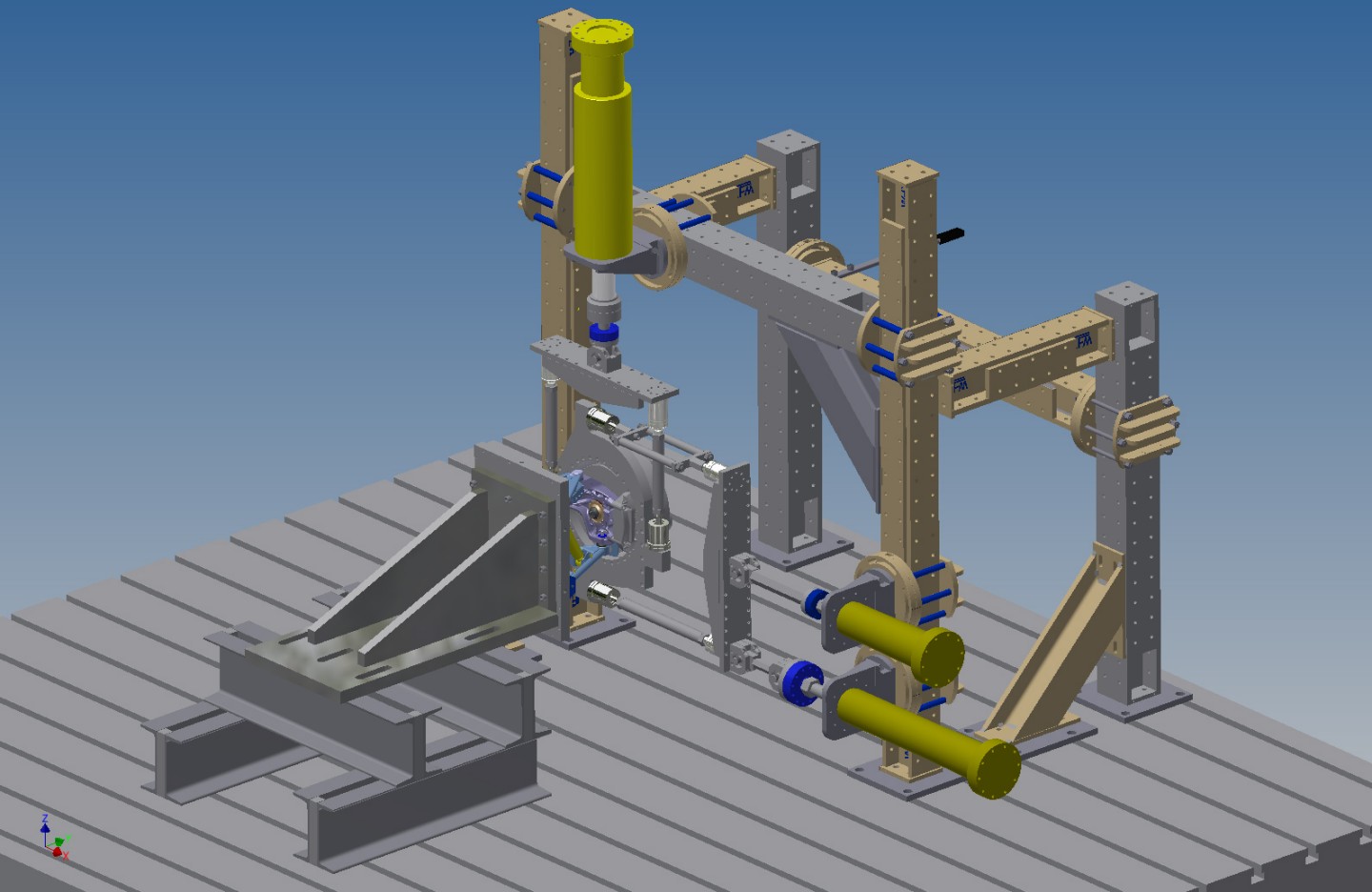
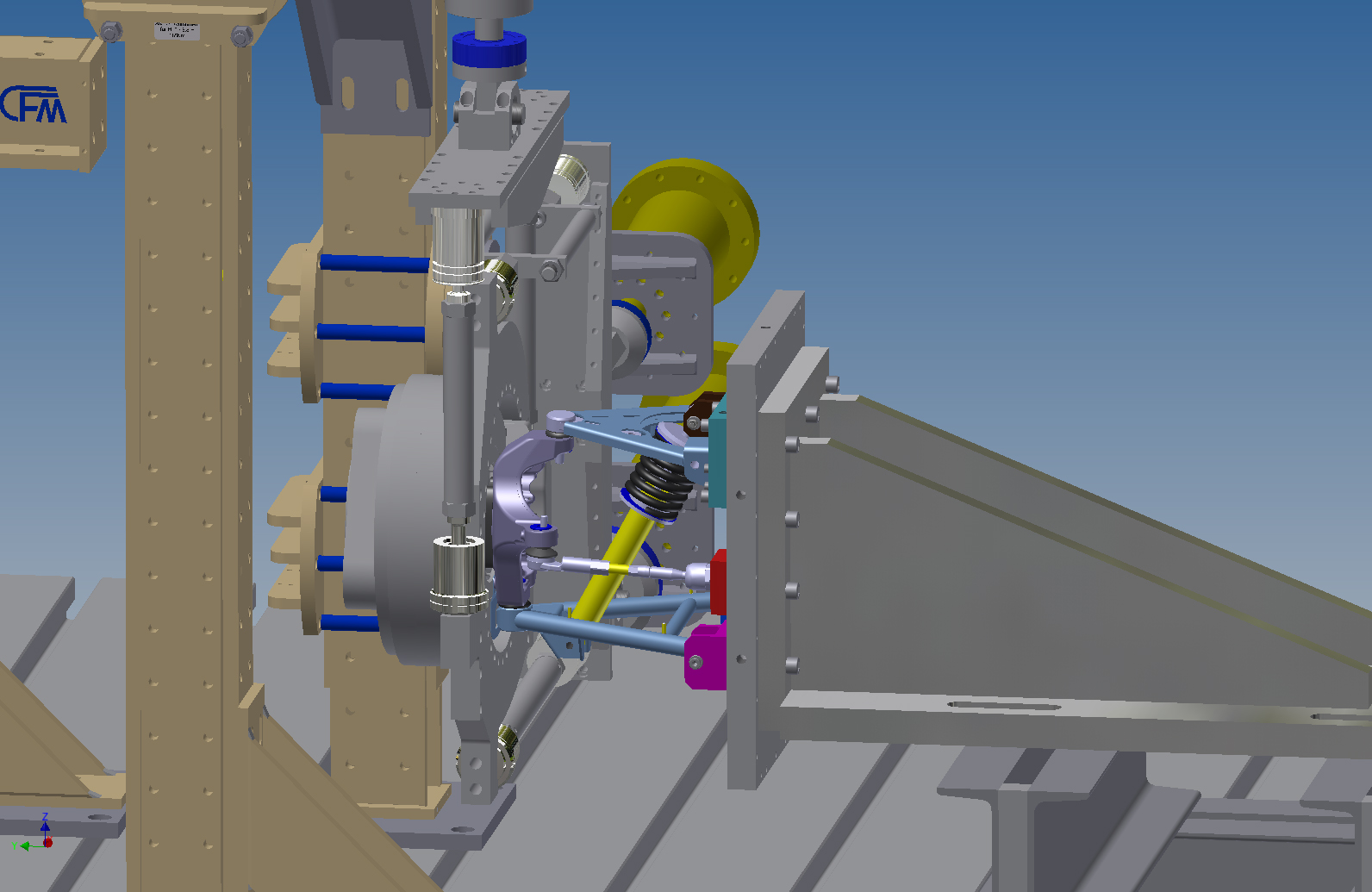
Abbildung 1: drei-kanaliger, servohydraulischer Prüfstand für die Betriebsfestigkeitsprüfung radführender Komponenten.
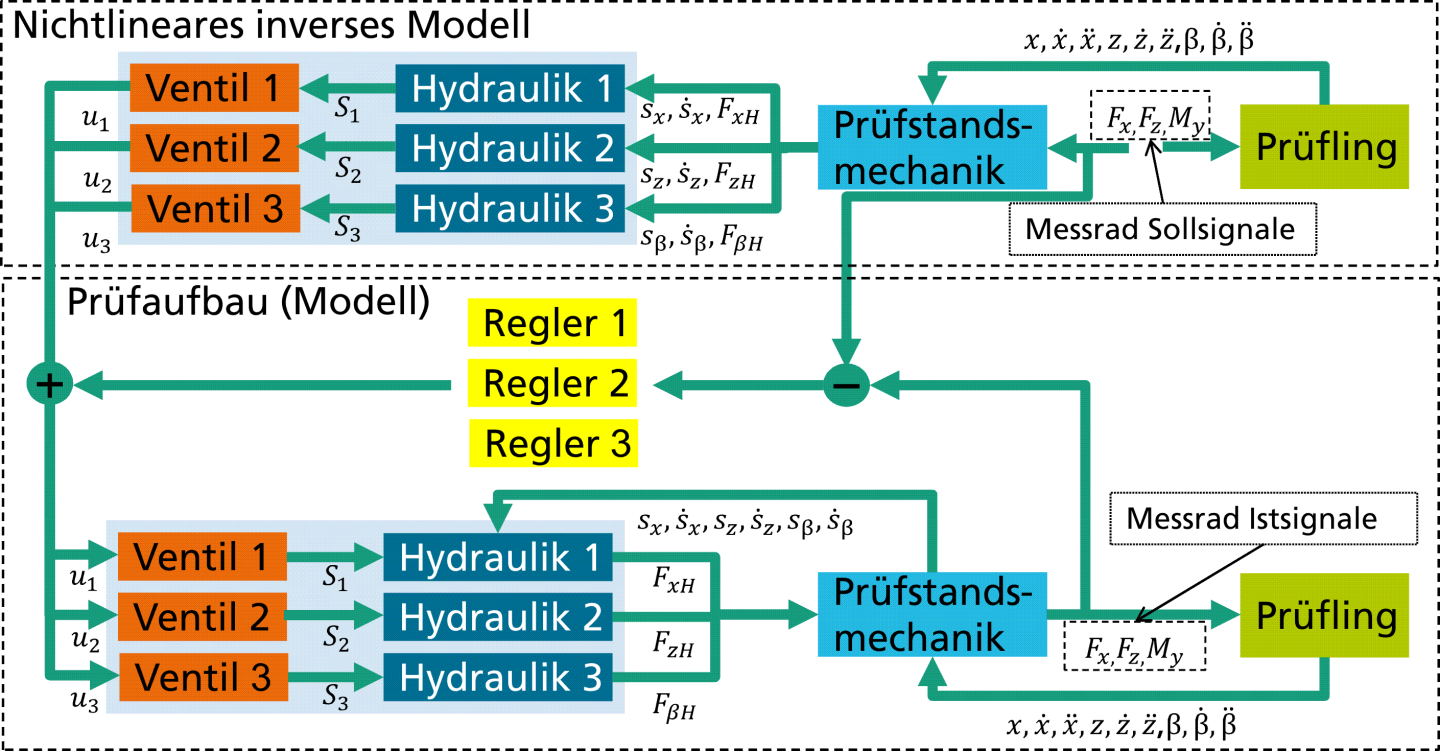
Abbildung 2: Modellstruktur des Prüfaufbaus mit vorgeschaltetem inversen Modell.
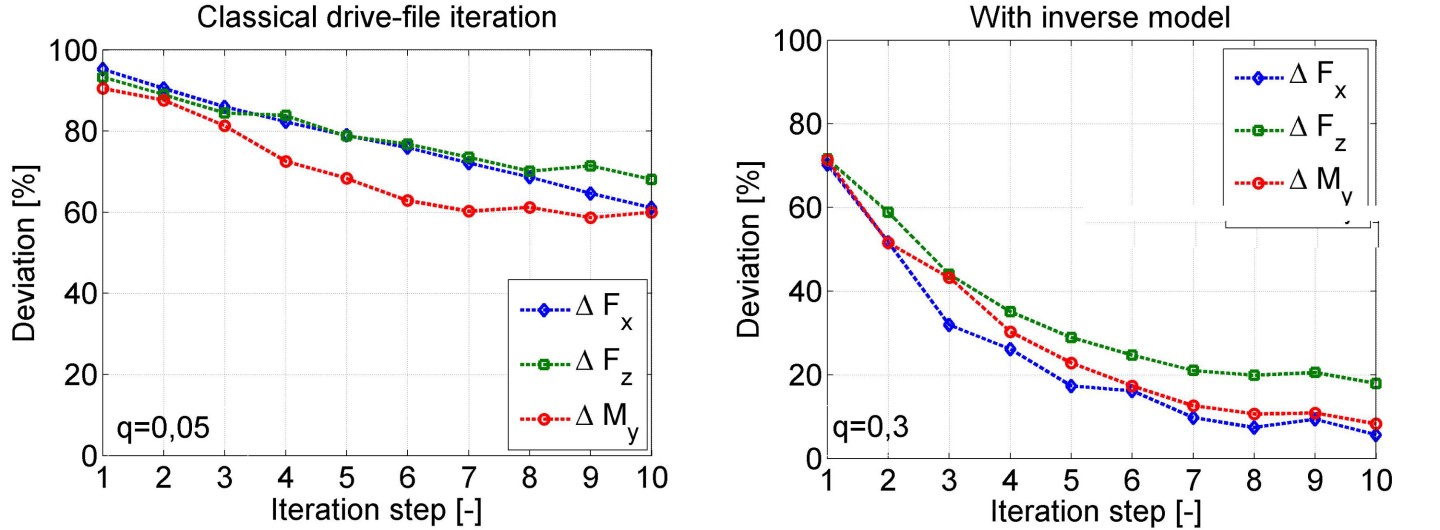
Abbildung 3: Konvergenzverlauf der Drive-File-Iteration ohne (links) und mit (rechts) Verwendung des nichtlinearen inversen Modells.
Problemstellung:
Bei den im Bereich der Betriebsfestigkeitsprüfung von Fahrwerksbaugruppen üblichen mehrkanaligen servohydraulischen Prüfständen ergibt sich vor Beginn der eigentlichen Prüfung oft ein erheblicher Aufwand bei der Bestimmung der Ansteuerungssignale („Drive-Files“) für den Prüfstand, mit denen sich die am Rad im Betrieb tatsächlich gemessenen Kräfte und Momente reproduzieren lassen. Dieser Aufwand entsteht im Wesentlichen auf Grund der Nichtlinearität im dynamischen Verhalten des Gesamtsystems aus Prüfstand und zu prüfender Baugruppe. Am Beispiel des in Abbildung 1 gezeigten Prüfsystem ergeben sich die Nichtlinearitäten aus der Hydraulik, der Geometrie, mechanischer Lagerreibung, Elastomeren und dem nichtlinearen, semi-aktiven Dämpfer.
Lösungsansatz:
Anstatt der bisher üblichen Abbildung der Systemdynamik durch eine linearisierte Übertragungsmatrix wird ein physikalisches, nichtlineares Modell von Prüfstand und Prüfling erstellt und invertiert. Das inverse Modell ermittelt unmittelbar die erforderlichen Ansteuerungssignale aus den geforderten Lasten am Prüfling, Abbildung 2.
Eine Iteration ist nur noch notwendig, um verbleibende Ungenauigkeiten, die aus Modellabweichungen resultieren, zu kompensieren. Dabei werden direkt die Sollsignale am Eingang des inversen Modells iteriert.
Ergebnisse:
Die einzelnen Kanäle werden durch das inverse Modell weitgehend entkoppelt und linearisiert. Abbildung 3 zeigt, dass die Iteration daher deutlich schneller konvergiert, wodurch erheblich Zeit und Aufwand in der Prüfvorbereitung eingespart werden kann.
Die Simulationen zeigen auch die Robustheit des Verfahrens bei Modellungenauigkeiten. Auch
(semi-)aktive Systeme können durch den modellbasierten Ansatz problemlos mit einbezogen werden.