Virtuelle Testmethodik für automatisierte Fahrfunktionen und Fahrzeuge
Vollautomatisierte (VDA Level 4) und fahrerlose/autonome (VDA Level 5) Fahrfunktionen sind in den letzten Jahren weltweit ein Schwerpunkt der Forschung und Entwicklung geworden. Sie gelten als vielversprechender Lösungsansatz für die Herausforderungen straßenbasierter Mobilität: die Steigerung der Verkehrseffizienz, Erhöhung der Verkehrssicherheit, sowie Emissionsreduktion. Eine Schlüsselrolle kommt dem Thema Absicherung zu. Da bei Level 4- und Level 5-Systemen der Fahrer nicht mehr durchgängig und innerhalb notwendiger Reaktionszeiten als Rückfallebene zur Verfügung steht, muss die Automation alle erdenklichen Verkehrssituationen und potenziellen Gefährdungen selbst abfangen und sicher behandeln.
Der Sicherheitsnachweis, dass die Automation dazu in der Lage ist, kann aber mit heutigen Methoden weder mit Hilfe von Simulationen noch mit Realfahrten umfassend erbracht werden. Im Vorhaben SET Level sollen Simulationsplattformen entwickelt werden, mit denen kostengünstig und flexibel automatisierte und vernetzte Fahrfunktionen im städtischen Bereich getestet werden können.
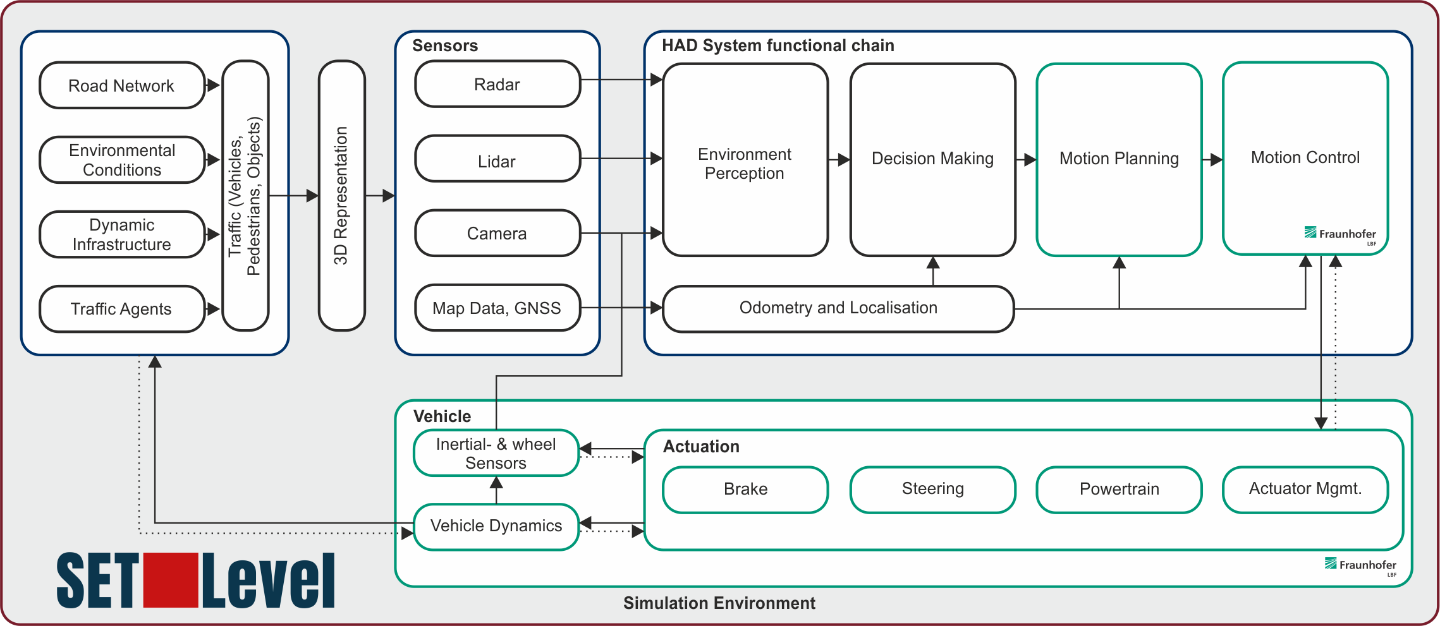
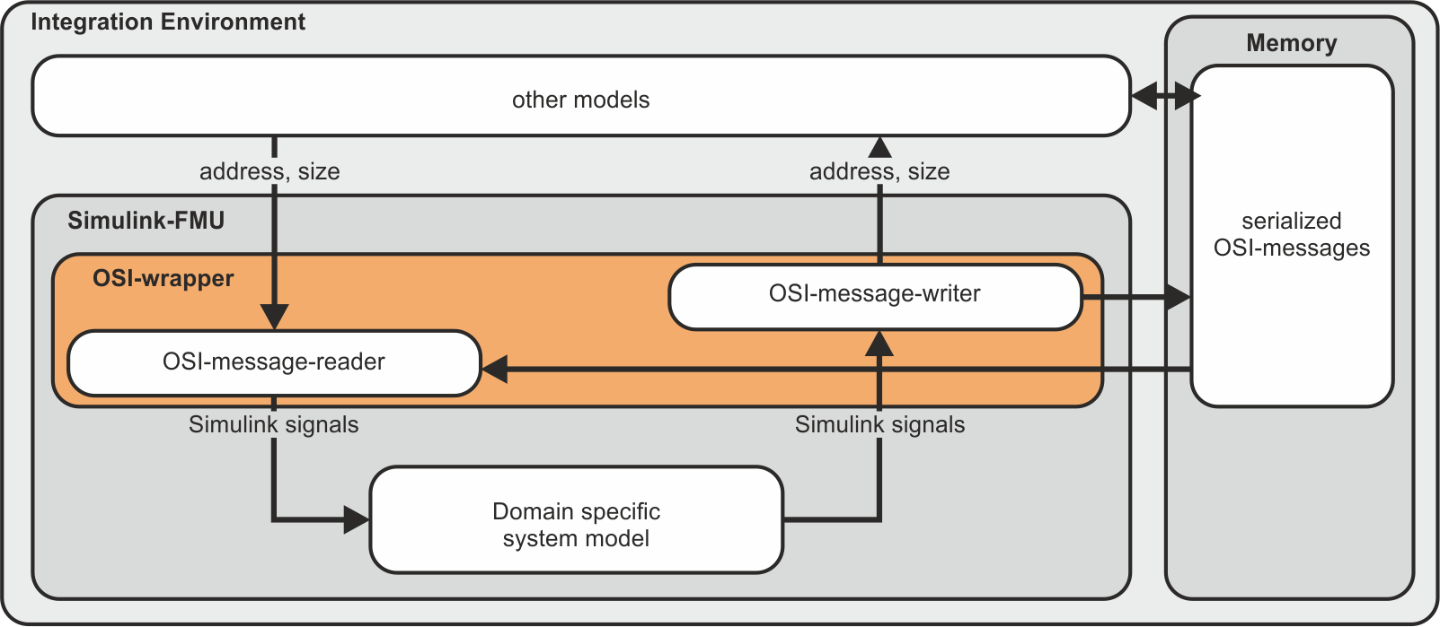
Das Fraunhofer LBF entwickelt Methoden und Werkzeuge, um in einer Closed-Loop- Simulation die Wechselwirkung von Fahrzeugsystemen und automatisierten Fahrfunktionen in einer szenarienbasierten Umgebung zu testen. Dazu werden Komponentenmodelle des Fahrzeugs wie zum Beispiel Antriebstränge, Bremse, Lenkung oder Fahrzeugdynamik und der automatisierten Fahrfunktionen wie zum Beispiel der Fahrzeugsteuerung (Motion Control) sowie Schnittstellen erstellt, um diese Modelle in unterschiedlichen Integrationsumgebungen einzubinden. Der modulare Aufbau ermöglicht es, automatisierte Fahrfunktionen effizient mit unterschiedlichen Antriebsträngen, Lenk- oder Bremssystemen sowohl mit unterschiedlichen Fahrzeugvarianten als auch in unterschiedlichen Fahrsituationen zu erproben. Durch die Schnittstellen können Systemmodelle aus Matlab/Simulink in die virtuellen Prüfumgebungen eingebunden werden und dabei die Standardnachrichten des Open Simulation Interface (OSI) einlesen und erzeugen. Dies ermöglicht es dem Systementwickler, zum Beispiel bei der Entwicklung von Lenkung, Bremsen oder Antriebstrang, vollständig in seiner gewohnten Umgebung zu arbeiten und Systeme direkt gegen virtuelle Testfälle für automatisierte Fahrzeuge zu testen.
Gleichzeitig können Entwickler automatisierter Fahrfunktionen in ihrer testgetriebenen Entwicklung direkt die Wechselwirkungen der Fahrfunktion mit den Systemeigenschaften unterschiedlicher Zielfahrzeuge prüfen. Auf unterschiedliche Anforderungen des jeweiligen Systemtests in Hinblick auf die Genauigkeit und Simulationsgeschwindigkeit wird innerhalb der Closed-Loop- Simulation mit unterschiedlichen Detailgraden der Teilmodelle reagiert. Ein Fahrzeug kann durch eine einfache Kinematik dargestellt werden, um Routenplanung oder Einparkmanöver zu testen, während für die Erprobung plötzlicher Ausweichmanöver oder Fehler, wie der Verlust von Bremsflüssigkeit oder Ausfälle in der Leistungselektronik, ein komplexeres Modell der Fahrdynamik und Aktorik eingesetzt wird, welches das das Fahrverhalten in diesen Situationen nachbilden kann.
Um die Entwicklung sicherer, automatisierter Fahrzeuge industrieweit zu unterstützen und die Vereinheitlichung von Prozessen zur nachvollziehbaren Überprüfung der Sicherheit von Fahrzeugen zu vereinheitlichen, wird das Ziel verfolgt, nach Projektende die Methoden und Modelle quelloffen der Öffentlichkeit zur Verfügung zu stellen.
Großforschungsprojekt des BMWi
