Fahrwerk, Komfort, Sicherheit

Unser Team für Digitalisierung in der Prüftechnik

Mit dem zunehmenden Einsatz elektrischer Antriebe in PKW verschieben sich die Herausforderungen im NVH-Bereich (noise, vibration and harshness) vom Antriebsstrang weg in Richtung anderer Fahrzeugelemente. Ein zentrales System ist dabei die Aufhängung. Diese hat zwei wesentliche Funktionen:
Zukünftig kommen auch neue Funktionen, wie z.B. die Verhinderung von Kinetose („Seekrankheit“) in autonomen Fahrzeugen, hinzu.
Das zentrale Element einer Aufhängung in Bezug auf das NVH-Verhalten ist der Dämpfer. Ursprünglich grundsätzlich ein passiver Dämpfer (), führt die Entwicklung hin zu aktiven und semi-aktiven Dämpfern, die während der Fahrt in ihrem Verhalten angepasst werden können. Aktive Dämpfer implementieren dazu ein Kraftelement (), während die Dämpfungskonstante bei semi-aktiven Dämpfern durch ein externes Steuerungssignal angepasst werden kann (). Dadurch weisen semi-aktive Dämpfer einen besonders niedrigen Energieverbrauch auf.
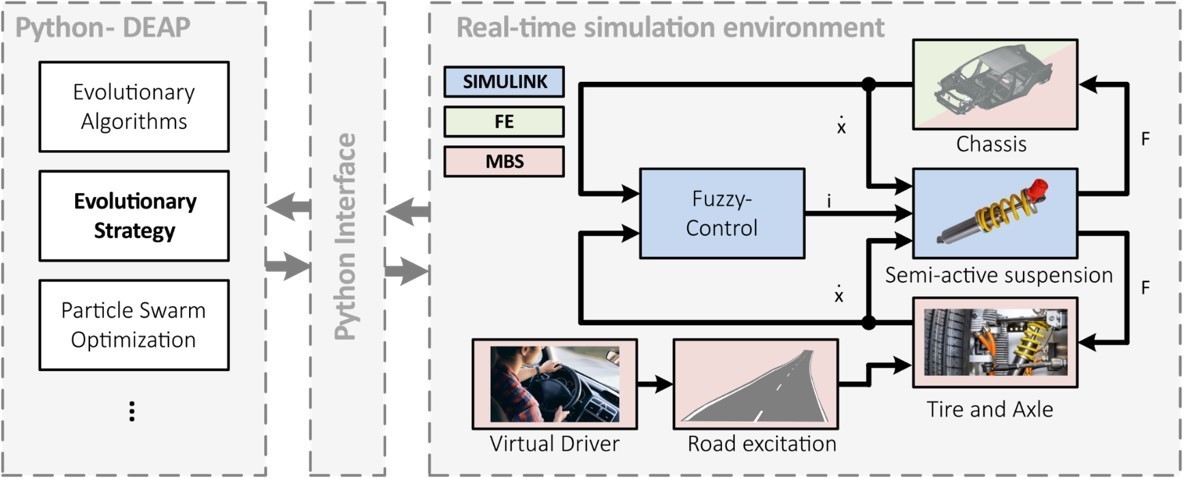
Die zentrale Herausforderung bei der Nutzung semi-aktiver Dämpfer ist: Wie ist das Steuersignal zu wählen, um Sicherheit und Komfort gleichzeitig zu optimieren? Semi-aktive Dämpfer verhalten sich im allgemeinen hochgradig nichtlinear, weshalb klassische Regelungsansätze wenig geeignet sind. In der modernen Fahrzeugentwicklung stehen üblicher Weise dynamische Fahrzeugmodelle für die Simulation zur Verfügung, allerdings sind diese zu komplex, um in einer echtzeitfähigen modellbasierten Regelung eingesetzt zu werden. Daher nutzen wir einen Fuzzy-Regler, der die Nichtlinearität des semi-aktiven Dämpfers durch die fuzzyfizierte Unterscheidung mehrerer Betriebszustände beherrschen kann. Dazu wird der Ausgang des Fuzzy-Reglers basierend auf Geschwindigkeit und Auslenkung des Dämpfers bestimmt.
Fuzzy-Regler haben wesentlich mehr Parameter als klassische Regler wie z.B. PID. Daher muss ein umfangreiches Optimierungsproblem gelöst werden. Dazu setzen wir evolutionäre Algorithmen aus der Python-Toolbox DEAP (Distributed Evolutionary Algorithms in Python) ein.
Evolutionäre Algorithmen basieren auf einer „Population“ von „Individuen“, die sich über die „Generationen“ entwickelt, um eine Zielfunktion bestmöglich zu erfüllen. Ein Individuum ist durch sein „Genom“, entsprechend einem bestimmten Parameterset, definiert. Im Falle des Fuzzyreglers besteht das Genom aus angepassten Aktivierungsfunktionen für jeden Eingang sowie den Ausgangswerten für jede Kombination von Aktivierungen.
Für jedes Individuum wird eine „Fitness“ entsprechend der Zielfunktion berechnet. Die Fitness beschreibt, wie gut der Regler mit diesem spezifischen Parameterset arbeitet. Eine Fitnessfunktion für multikriterielle Optimierung besteht aus mindestens zwei Werten. Hier werden die Kontaktkraft zwischen Reifen und Straße als Maß für die Sicherheit sowie die Beschleunigungsamplitude am Fahrersitz für den Komfort betrachtet.
Neue Generationen werden durch Vermischung (cross-over) des Genoms je zweier „Eltern“ gebildet. Optional werden einzelne Parameter darüber hinaus zufällig „mutiert“. Anschließend werden die fittesten Individuen der vergrößerten Population ausgewählt.
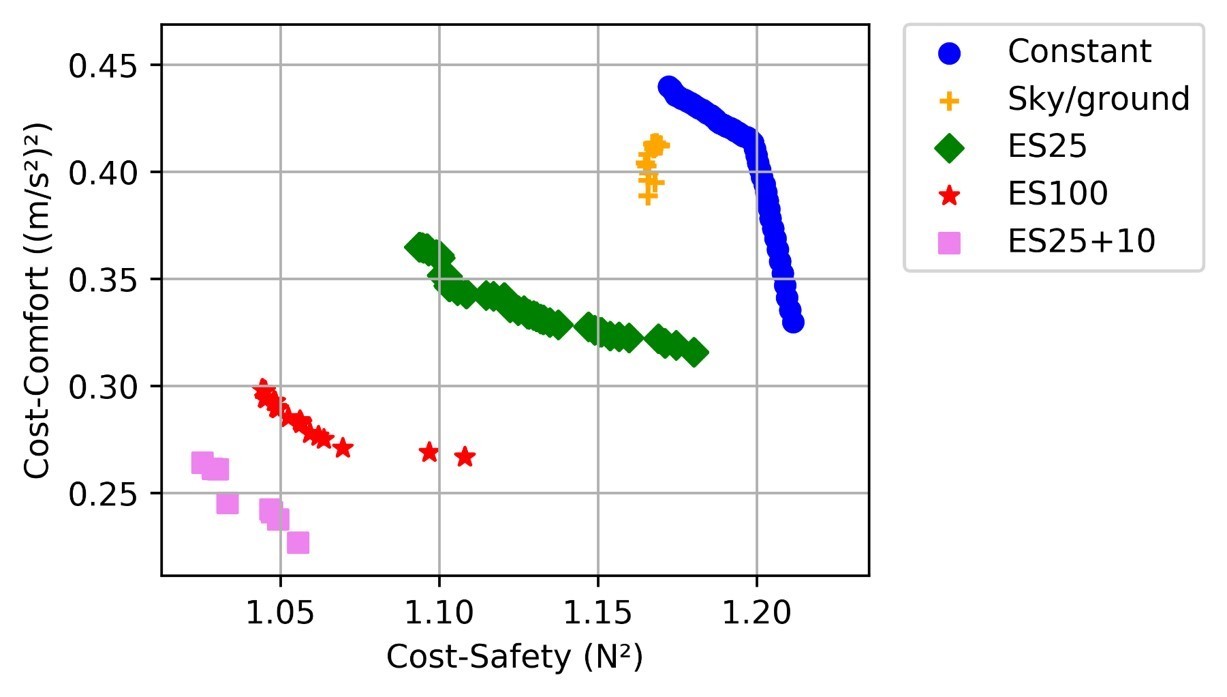
Die ursprüngliche Population weist eine große Variation im Verhalten hinsichtlich Komfort und Sicherheit auf. Über die Generationen bildet sich durch das Auswahlverfahren eine Pareto-optimale Front heraus, bei der jedes Individuum einen optimalen Kompromiss zwischen Sicherheit und Komfort darstellt.
Unterschiedliche Einstellungen in der Optimierung erlauben zusätzliche Freiheitsgrade, wodurch stärker ausgeprägte Paretofronten gebildet werden können. Die klassischen Lösungsansätze mit konstantem Dämpferstrom oder linearem Feedback (z.B. Sky-hook damping) erreichen nicht die gleichen Werte für Sicherheit und Komfort wie der betrachtete Fuzzy-Regler.